HS-E16多功能智能小车
HS-E16多功能智能小车
产品简介:
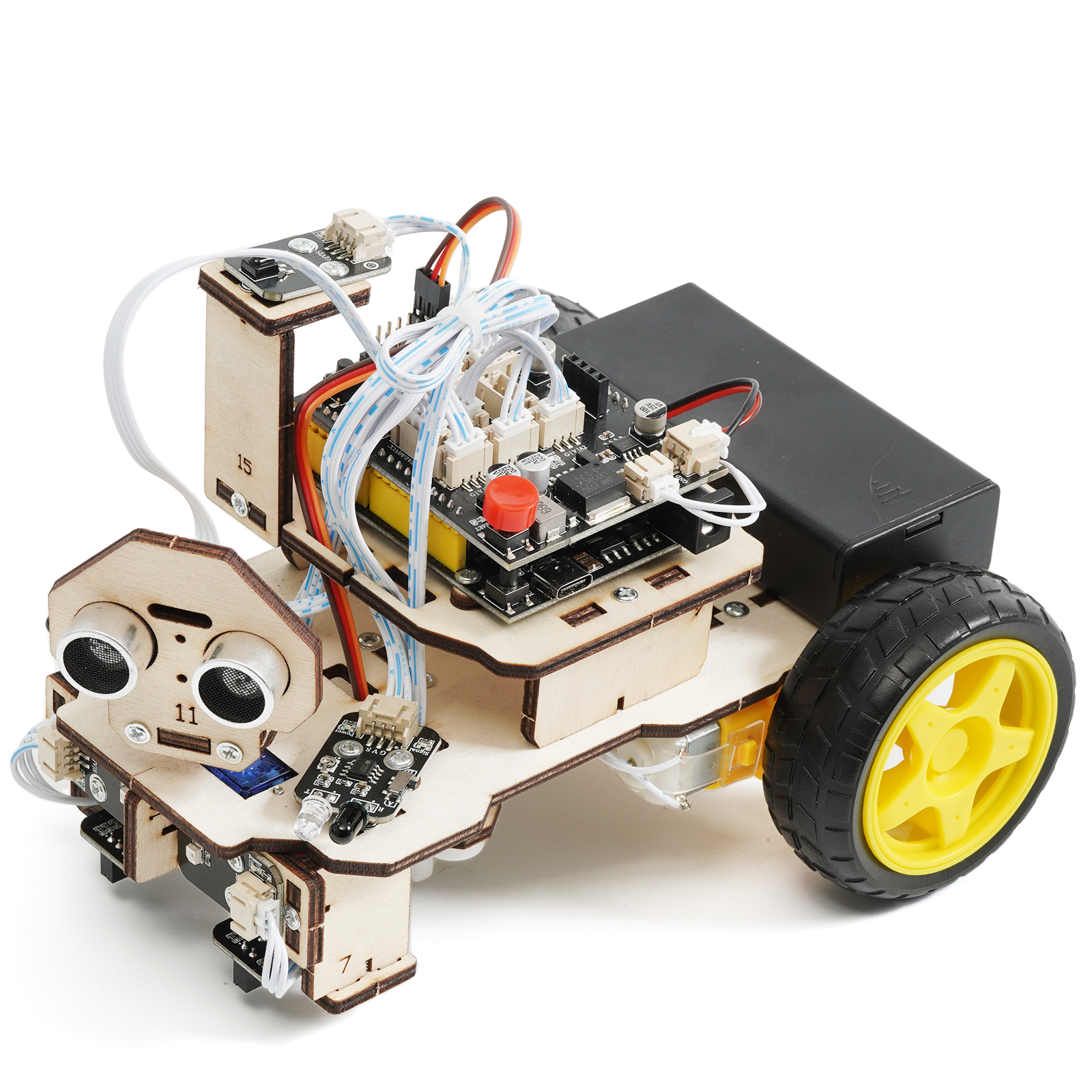
多功能智能小车是一款由红外传感器(循迹模块)、红外传感器(避障模块)、超声波传感器、环境亮度传感器、38K红外遥控接收模块等配件组合而成的智能套件。
本款套件可实现:多功能智能小车可实现,智能小车指定动作实验,智能小车按键启停实验,智能小车红外避障实验,智能小车超声波红外避障实验,智能小车超声波追随小车实验,智能小车巡线(黑线)小车实验,智能小车红外遥控小车实验,智能小车寻光小车实验。你也可以通过Arduino IDE、Mixly 等编程软件修改示例程序或自己编写新程序来控制多功能智能小车。(米思齐Mixly软件前往 http://www.hellostem.cn/?software/ 下载)
准备工具及组装注意事项:
自备调试工具:带有Windows 7、8、10、11操作系统的电脑1台、一把小剪刀、UNO-R3开发板、typc数据线1条、产品需要脱机工作请自备或者购买DC头6V-12V电源。
想要轻松组装好套件需要仔细阅读组装说明书,按步骤进行组装,疑难问题请扫二维码关注公众号查看相关教程,或寻找在线客服进行指导。
 警告:
警告:
14岁以下人员必须在专业老师或有相关知识的成年人指导下使用! 该产品组装、调试需要使用相关工具,组装时请做好安全防范,避免受伤! 本产品为教学实验用品,请勿将其功能作为生活常规用品使用,会存在不稳定性! 当你不使用本产品时请关闭电池盒上的电源开关并取下电池,将电池妥善保管!
示例程序下载:点击下载
(文件解压密码请查看您购买的商品条形码,商品数字条形码为解压密码)

STEP:1

准备好所有配件及木板材料,木板材料组装时请仔细核对材料上的编号。木板有图案面为正面,没有图案为背面。
STEP:2

把⑤号板安装在⑨号板上。
STEP:3

用10mm粗纹螺丝把球形万向轮安装在⑤、⑨号板上。
STEP:4

首先把机丝螺丝M3*28mm穿过TT电机和②号板,然后用机丝螺帽进行固定。注意:TT电机导线朝向和②号板朝向一定要与上图一致。
STEP:5

首先把机丝螺丝M3*28mm穿过TT电机和③号板,然后用机丝螺帽进行固定。注意:TT电机导线朝向和③号板朝向一定要与上图一致。
STEP:6

用7mm粗纹螺丝把②号板安装在⑨号板上。
STEP:7

用7mm粗纹螺丝把③号板安装在⑨号板上。
STEP:8

把两个TT电机的导线穿过①号板。注意:①号板反面朝上。
STEP:9

用7mm粗纹螺丝把①号板安装在②、③、⑤号板上。
STEP:10

首先用7mm粗纹螺丝把舵机安装在①号板上,然后把舵机导线穿过①号板的孔洞。
STEP:11

用7mm粗纹螺丝把两块⑦号板安装在①号板上。
STEP:12

用7mm粗纹螺丝把⑭号板安装在⑯号板上。
STEP:13

用7mm粗纹螺丝把⑯号板安装在两块⑦号板上。
STEP:14

首先把一条15cm的4P双头端子线插入超声波模块,然后把15cm的3P双头端子线分别插入38K红外遥控接收模块、两个红外传感器(避障模块)和两个红外传感器(循迹模块),最后把20cm的3P双头端子线插入环境亮度传感器。
STEP:15

用4mm粗纹螺丝把两个环境亮度传感器安装在⑯号板两端。
STEP:16

参照上图,把两个环境亮度传感器的双头端子线穿过①号板的孔洞。
STEP:17

用4mm粗纹螺丝把红外传感器(循迹模块)安装在⑧号板上。
STEP:18

把两个红外传感器(循迹模块)的双头端子线穿过①号板的孔洞。
STEP:19

用7mm粗纹螺丝把红外传感器(避障模块)安装在两块⑬号板上。
STEP:20

把红外传感器(避障模块)上的7mm粗纹螺丝安装在①号板上。
STEP:21

用7mm粗纹螺丝把④、⑥号板安装在①号板上。
STEP:22

首先用7mm粗纹螺丝把四个小圆片安装在UNO-R3开发板上,然后把UNO-R3开发板上的7mm粗纹螺丝安装在⑩号板上。
STEP:23

参照上图,把前后的导线整理好,并塞进⑩号板的孔洞。
STEP:24

用7mm粗纹螺丝把⑩号板安装在④、⑥号板上。
STEP:25

用4mm粗纹螺丝把电池盒安装在①号板上。
STEP:26

首先把HS-UNO-EXA3扩展板安装在UNO-R3开发板,然后在电池盒内装入电池并将电池盒盖子安装好。
STEP:27

首先用7mm粗纹螺丝把⑰号板安装在⑮号板上,然后用4mm粗纹螺丝把38K红外遥控接收模块安装在⑰号板上。
STEP:28

用4mm粗纹螺丝把超声波传感器安装在⑪号板反面。
STEP:29

首先参考【多功能智能小车-接线示意图】把红外传感器(循迹模块)、红外传感器(避障模块)、超声波传感器、环境亮度传感器、38K红外遥控接收模块和舵机的导线插入HS-UNO-EXA3扩展板上,然后把电池盒导线插入HS-UNO-EXA3扩展板电源接口上,再然后把舵机导线插入HS-UNO-EXA3扩展板上的D12上,最后把TT电机导线插入HS-UNO-EXA3扩展板上。注意:请核对好端口线序再插入,线序插错可能会烧坏电路板。
STEP:30

首先用7mm粗纹螺丝把⑮号板安装在⑩号板上,然后使用米思齐Mixly 软件将该套件的舵机初始化复位上传至UNO-R3开发板上。(米思齐Mixly软件前往 http://www.hellostem.cn/?software/ 下载)警告:不能跳过此步骤进行下一步安装,跳过此步骤将会导致后续安装失败!
STEP:31

首先用4mm粗纹螺丝把舵机盘安装在⑫号板上,然后用5mm舵机螺丝把舵机盘安装在舵机上,舵机螺丝在舵机袋子里。注意:安装时不要转动舵机。注意:请务必断电情况下安装舵机盘(臂),舵机通电时候不要有机械阻力如拧螺丝、 掰 、 扯,阻力大于舵机扭力会发烫烧坏舵机。
STEP:32

手轻轻捏住⑫号板,然后用7mm粗纹螺丝把⑪号板安装在⑫号板上。
STEP:33

在循迹模块通电的情况下,用小螺丝刀调节两个循迹模块的电位器,使手离红外探测传感器探头1cm左右,模块信号指示灯检测到黑色胶带循迹模块的蓝灯要熄灭。注意:红外探测传感器的红外发射和接收探头受环境光线干扰较大,请不要在阳光太强的环境下调试。
STEP:34

在红外避障模块通电的情况下,把手放在离红外探测探头5cm位置,用小螺丝刀调节两个红外避障模块的电位器直到红外避障模块手在距离5cm范围内模块信号指示蓝灯变亮,手离探头5cm外模块信号指示蓝灯熄灭,才算调试成功。注意:红外避障模块属于光学传感器,在强光下光线会对传感器形成干扰,不适合在室外使用。其次环境中的黑色障碍物也会对传感器造成干扰。
STEP:35

首先用7mm粗纹螺丝把⑧号板安装在两块⑦号板上,然后把两个车轮安装在两个TT电机上。
STEP:36

使用扎带把导线扎好,然后剪掉多余的扎带。注意:使用剪刀时请小心,做好安全防范,孩子务必在大人的陪同下使用剪刀。
STEP:37

使用米思齐Mixly软件将该套件的智能小车红外遥控小车示例程序上传至UNO-R3开发板。
STEP:38

此套件可实现:按下遥控器“A”控制小车开始和停止,按下摇控器“⚙”设置键;控制小车开始。
按下遥控器“∧”小车前进,按下遥控器“<”小车左转前进,按下遥控器“>”小车右转前进,按下遥控器“∨”小车后退,按下遥控器“E”小车向左旋停止转,按下遥控器“F”小车向右旋转停止,按下遥控器“1”小车一直左转,按下遥控器“2”小车一直右转,按下遥控器“3”小车一直左旋z转,按下遥控器“4”小车一直右旋转。
示例程序下载:点击下载
(文件解压密码请查看您购买的商品条形码,商品数字条形码为解压密码)
警告:不能跳过此步骤进行下一步安装,跳过此步骤将会导致后续安装失败!你也可以通过Arduino IDE、Mixly 等编程软件修改示例程序或自己编写新程序来控制多功能智能小车。
注意:使用多功能智能小车请自备或者购买双节18650尖头锂电池(DC6V~12V电源)。
STEP:39

超声波红外避障模式:多功能小车通电之后,小车进入自动行驶状态,如前方遇到障碍物将自动躲避 。
STEP:40

超声波红外跟随模式:多功能小车通电之后,小车将跟随前方10cm范围内的物体前进、后退、转弯。
STEP:41

循迹模式:多功能小车通电之后,小车将跟随黑色轨道前进。
STEP:42

循迹模式虚拟轨道制作:用黑色胶布粘一条宽50cm,长80cm的跑道,也可以粘无规则跑道,形状自定义,不能有急弯和平行重叠。注意:必须在光滑或折射率较高的平面布置轨道,因为循迹传感器是由光反射来感应的。